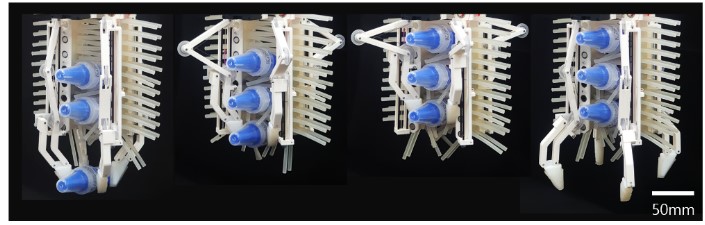
서울대학교 공과대학은 기계공학부 연구팀이 사람처럼 여러 물체를 한 번에 옮길 수 있는 로봇 그리퍼(MOGrip)를 개발했다고 밝혔다. 효율적 작업을 위해 물체를 하나씩 옮기지 않고, 여러 개를 동시에 옮기는 모습을 보고 영감을 얻어 연구를 시작했다.


손가락-디커플링 링크가 설치된 RP조인트
연결고리 커플링은 두 회전축의 토크와 각속도를 동일하게 유지하여 동력을 효율적으로 전달합니다.

동력 전달은 토크와 각속도의 곱으로 표현된다.
'연구뉴스-기계' 카테고리의 다른 글
| 촉감 전달 패치 개발 (0) | 2025.04.17 |
|---|---|
| 친환경 공기 정화 시스템 기술을 개발 (2) | 2025.02.17 |
| 정전기로 미세먼지 박멸 (0) | 2025.02.10 |